






▶3D 스캐너와 이동형 보조장비와의 결합으로 이동편의성 향상
구조물에 대한 성능평가는 이용자들에게 안전하고 편리한 도로주행을 담보하기 위해 조사 및 측정, 분석을 통해 구조물의 상태와 안전도를 평가하는 활동을 의미합니다. 평가 결과를 바탕으로 구조물의 손상부분을 복구하고 경과시간에 따라 요구되는 보수보강 활동을 수행하는 근거로 제시할 수 있으나, 인력작업 위주로 수행되고 있는 현재의 성능평가 작업은 조사자의 주관적인 판단이 들어가 결과에 대한 신뢰성이 결여되는 문제를 포함하고 있습니다. 또한 기존 3D 스캔 측량의 경우, 정확도 향상을 위해 측정 범위 내에 프리즘을 여러 번 이동 및 설치해야 했으며, 무겁고 부피가 큰 3D 스캐너를 구간 별로 이동하면서 측정하는 방식으로, 작업시간이 오래 소요된다는 한계가 있습니다.
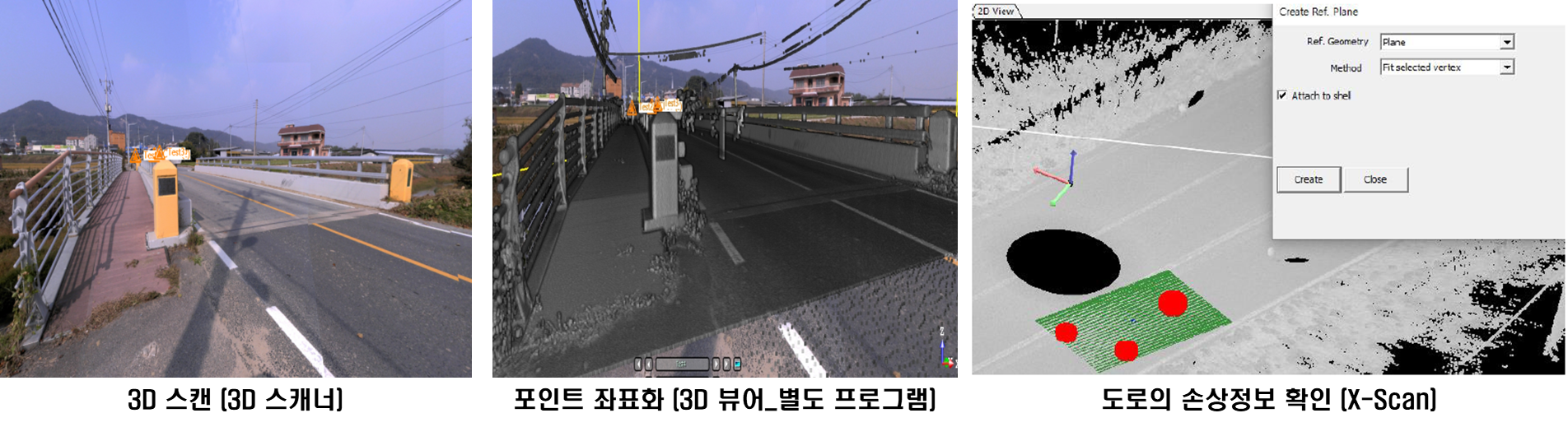
신청기술은 3D 레이저 스캐닝 기술과 센서를 통해 획득한 데이터를 연결시키는 3D 좌표화 매핑 기술을 이용하여 교량, 도로 등 구조물의 상태 및 성능을 진단하는 기술로, 광파기(프리즘)의 이동 없이도 측정 범위 내에서 신속하고 정확하게 측정할 수 있도록 기존의 3D 스캐너 장치에 이동형 장비를 결합하였습니다.

▶3D영상 시각화 및 좌표화로 구조물 안전진단 정확도 확보
이동형 3D 스캐너 장치를 이용해 획득한 시설물의 외관데이터와 센서의 종ㆍ횡단 데이터를 신청사에서 개발한 데이터 획득 및 처리 프로그램을 통해 3D Visual data로 정합ㆍ시각화시켰습니다. 스캐너를 통해 획득되는 3D형상데이터는 1차로 3D 좌표(x, y, z)별로 포인트화를 수행, 포인트 클라우드 DB상에 저장된다. 이후 촬영된 구조물 표면과 포인트 클라우드 상의 3D 매칭을 통해 현실적인 영상정보를 구현하였습니다.
구조물의 손상정보를 추출하기 위해 획득한 영상정보에서 폴리곤 데이터를 생성하여, 진단하고자 하는 영역의 면적 및 체적을 계산할 수 있다. 폴리곤 데이터를 생성하기 위해 추출한 영상데이터에서 설정하고자 하는 영역을 선정하고, ‘Delaunay Triangulation기법’을 통해 포인트로 구성된 데이터로부터 폴리곤 데이터를 추출 할 수 있으며, 생성된 폴리곤 영역을 분석함으로써 교량 및 도로 상의 손상정보를 쉽게 획득 할 수 있습니다.
▶실시간 도로상태 측정을 위한 장비 소형화 및 측정프로그램 구현
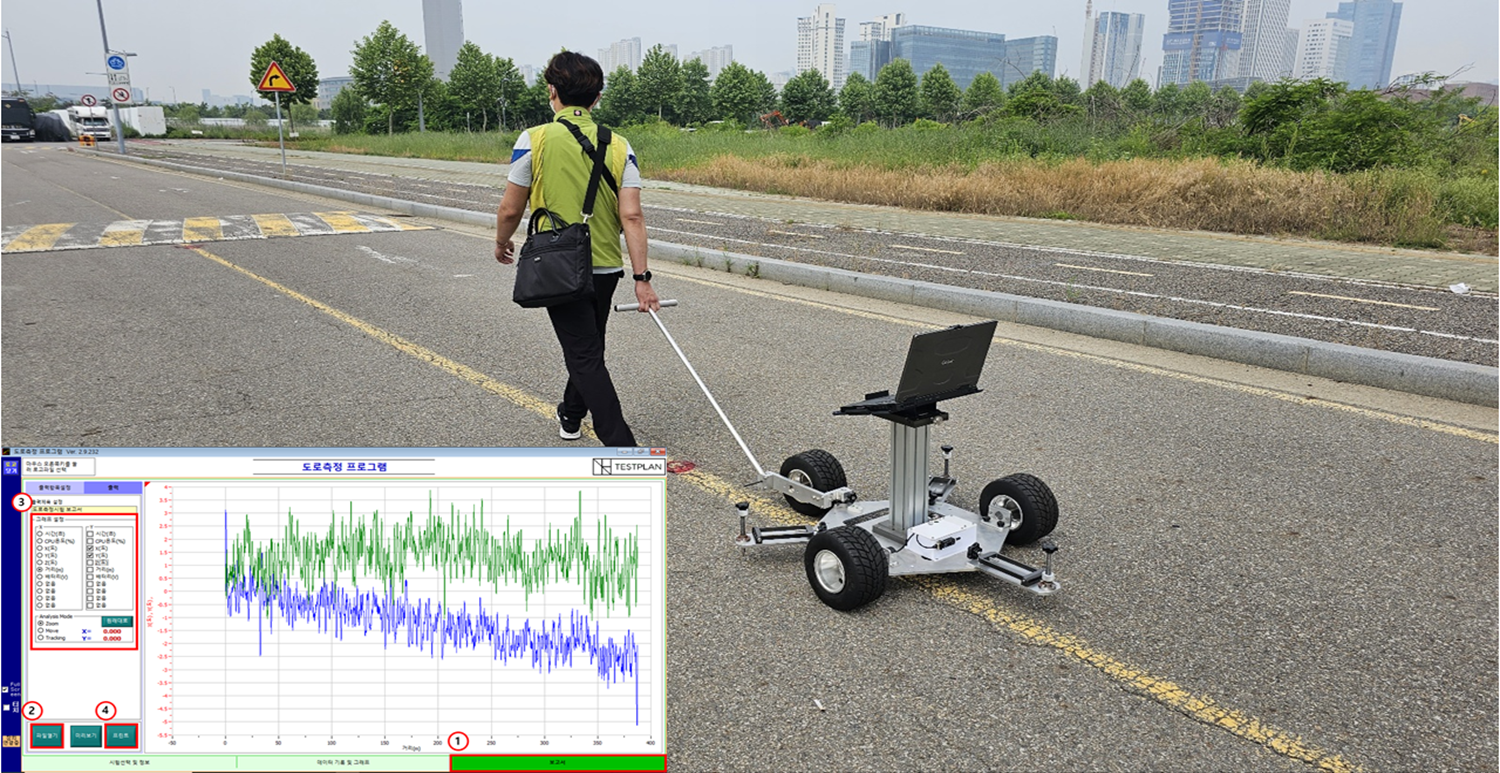
기존 도로 상태 측정은 PMS(Pavement Management System)로 이루어지고 있는데, 주로 차량에 레이저 등 장비를 부착하여 주행하면서 도로 표면 데이터를 획득할 수 있으며, 측정데이터는 연동된 프로그램을 통해 분석해 왔습니다. 그러나, 차량을 이용한 측정은 휴대성이 저하되며, 소규모 측정에 있어 과도한 예산 낭비가 문제로 제기되고 있습니다.
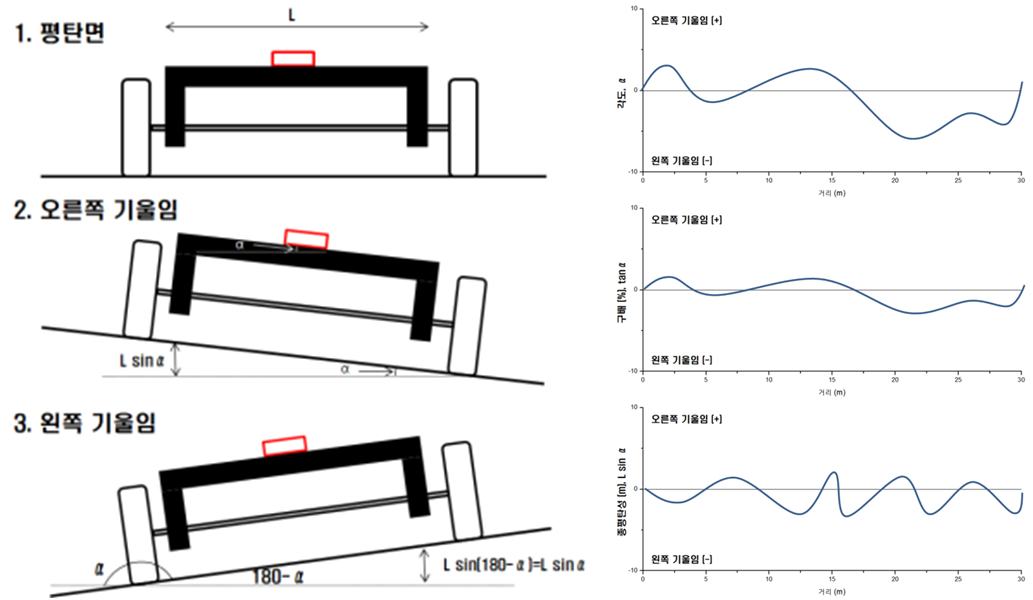
신청기술은 IMU 센서(관성 측정 장치, Inertial Measurement Unit)를 부착한 이동형 장비를 이동시키면서 도로 표면 상의 종ㆍ횡단도(X축, Y축 기울기)를 측정하고, 획득한 데이터는 연동된 도로 측정 프로그램을 통해 실시간으로 분석 및 시각화하도록 구현하여 해당 문제를 해결하고자 하였습니다.
 |  |